图 由 顶点集 和 边集 组成,即,
- 是顶点的集合,顶点代表数据元素
- 是连接顶点的边的集合,边代表元素间的关系
根据边的方向性,可将图分为 有向图 和 无向图
- 有向图:边有方向,边用
<>表示,例如,<A, B>表示从 A 出发到 B 的一条边 - 无向图:边无方向,用
()表示,例如,(A, B)表示顶点 A 和 B 之间有一条边
另外,可以根据顶点之间的关系为边设置权重
- 加权图:边被赋予一个权值
W - 加权有向图:边表示为
<A, B, W> - 加权无向图:边表示为
(A, B, W)
# 图的操作
基本操作:
- 构造一个由若干个节点、0 条边组成的图
- 判断两个节点之间是否有边存在
- 在图中添加或删除一条边
- 返回图中的节点数或边数
- 按某种规则遍历图中的所有节点
一些与应用密切关联的操作
- 拓扑排序
- 关键路径
- 找最小生成树
- 找最短路径等
# 图的抽象类
以加权有向图为例
template <class TypeOfVer, class TypeOfEdge> // 数据元素的类型 TypeOfVer ,边的权值的类型 TypeOfEdge | |
class graph { | |
public: | |
virtual void insert(TypeOfVer x, TypeOfVer y, TypeOfEdge w) = 0; | |
virtual void remove(TypeOfVer x, TypeOfVer y) = 0; | |
virtual bool exist(TypeOfVer x, TypeOfVer y) const = 0; | |
virtual ~graph() {} | |
int numOfVer() const {return Vers;} | |
int numOfEdge() const {return Edges;} | |
protected: | |
int Vers, Edges; | |
}; |
# 图的术语
度:图中连接于某一节点的边的总数
- 入度:有向图中进入某一节点的边数
- 出度:有向图中离开某一节点的边数
子图:设 和 ,若 且 ,则称 是 的子图
路径:顶点的序列
- 简单路径:如果一条路径上的所有节点,除了起始节点和终止节点可能相同外,其余的节点都不相同
- 环:环是一条简单路径,其起始节点和终止节点相同,且路径长度至少为 1
路径长度
- 非加权的路径长度:组成路径的边数
- 加权路径长度:路径上所有边的权值之和
连通性:两点之间存在路径
- 无向图
- 连通:顶点 至 之间有路径存在
- 连通图:任意两点之间都连通的无向图,例如,左下图是一个连通图,右下图不是
- 连通分量:非连通图中的极大连通子图,例如,右下图的两个红圈就是连通分量

- 有向图
-
强连通图:顶点 至 之间有路径存在,例如,左下图是一个强连通图,右下图不是
-
强连通分量:非强连通图中的极大连通子图,例如,右下图的三个红圈就是连通分量
-
弱连通图:如有向图 不是强连通的,但如果把它看成是无向图时是连通的,则它是一个弱连通图,例如右下图
-

完全图
- 无向完全图:任意两个节点之间都有边的无向图,例如左下图
- 有向完全图:任意两个节点之间都有弧的有向图,例如右下图

生成树:连通图的极小连通子图,如下图中右侧两图就是左图的生成树
- 包含图的所有 个节点和 条边
- 在生成树中添加一条边之后,必定会形成回路或环

最小生成树:加权无向图的所有生成树中 边的权值和最小的生成树 ,如下图中右图就是左图的最小生成树

# 图的存储
图的顶点集合 存储在一个数组或者链表中
边的集合的表示方式通常有两种
- 邻接矩阵
- 邻接表
# 邻接矩阵
边的集合 用一个 的矩阵表示
对于有向图,如果 至 存在有向边, ;如果不存在有向边,
- 节点 的出度:第 行元素之和
- 节点 的入度:第 列元素之和

对于无向图,如果 至 存在一条边, ;如果不存在一条边,
- 矩阵 是一个对称矩阵
- 节点 的度:第 行 或者 第 列 元素之和

对于加权图,如果 至 有一条边并且权值为 ,则 ;如果 至 没有边,则 为空或其他标志(例如,定义为 正无穷 )

性能分析
-
优点:基本操作都是 的时间复杂度,不仅能找到出发的边,也能找到到达的边
-
缺点:即使边的数量远小于 ,也需 个单元的内存 (大多数的图的边数都远小于 )
# 邻接表
邻接表是图的标准存储方式
顶点集合 :用数组或单链表的形式存放所有的节点值,如果节点数 固定,则采用数组形式,否则可采用单链表的形式
边集合 :同一个节点出发的所有边组成一个单链表
- 如果是加权图,单链表的每个节点中还要保存权值

优点:
- 内存 = 节点数 + 边数
- 处理时间:节点数 + 边数,即,
缺点:
- 确定从 到 是否有边,最坏需要 的时间复杂度
- 有向图中寻找进入某节点的边,非常困难
- 无向图同一条边表示两次,边表空间浪费一倍
# 链式前向星
邻接表通过一条链表来记录每个顶点的所有邻边,然而,这些邻边之间是没有逻辑关系的(前后关系)
前向星可以让每个顶点的所有邻边具有逻辑关系:如果知道某个顶点的第一条边,就可以知道这个顶点的所有邻边
// 建立边结构体 | |
struct Edge { | |
int w; // 边的权值 | |
int to; // 边的终点 | |
int next; // 同起点的下一条边的的编号 | |
}; | |
Edge edges[N]; // N 为边的条数(针对无向图中的边 u -- v,需添加两条相反的边) | |
//edges [i].to 表示第 i 条边的终点 | |
//edges [i].next 表示与第 i 条边同起点的下一条边的编号 | |
//edges [i].w 表示第 i 条边的权值 | |
vector<int> head(N, -1); //head [i] 表示以 i 为起点的第一条边的编号 | |
// 也可以理解成:以 i 为起点的编号最大的边,因为前向星是使用的头插法,在最前面的就是最后插入的边 | |
int cnt = 0; | |
void add(int u, int v, int w) { // 添加一条起点为 u 、终点为 v 、权值为 w 的边 | |
edges[cnt].w = w; | |
edges[cnt].to = v; | |
edges[cnt].next = head[u]; | |
head[u] = cnt++; | |
} | |
// 遍历(遍历是逆序的) | |
for (int j = head[i]; j != -1; j = edge[j].next) { // 输出节点 i 的所有邻居节点 | |
cout << edges[j].to << endl; | |
} |
以下图为例
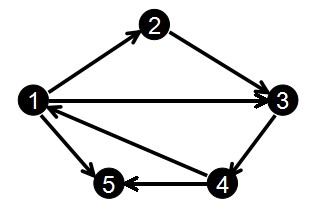
依次输入边的起点和终点:
1 2
2 3
3 4
1 3
4 1
1 5
4 5
对应 edges 和 head 数组的变化如下:
edge[0].to = 2; edge[0].next = -1; head[1] = 0;
edge[1].to = 3; edge[1].next = -1; head[2] = 1;
edge[2].to = 4; edge[2],next = -1; head[3] = 2;
edge[3].to = 3; edge[3].next = 0; head[1] = 3;
edge[4].to = 1; edge[4].next = -1; head[4] = 4;
edge[5].to = 5; edge[5].next = 3; head[1] = 5;
edge[6].to = 5; edge[6].next = 4; head[4] = 6;
参考:深度理解链式前向星
# 其他方法
- 逆邻接表:将进入同一节点的边组织成一个单链表

- 十字链表:既记录前驱又记录后继,而且每条边只存储一次

- 邻接多重表:解决无向图中边存储两次的问题。每个边的链表节点中存储与这条边相关的两个顶点,以及分别依附于这两个顶点下一条的边

参考:青舟智学:图的定义与存储